Currently my research activities are focused on:
- Cooperative freeway driving strategies in a mixed environment – autonomous and traditional vehicles
- Modelling vehicle-sharing systems
- Analytical approach to the optimal city layout
Cooperative freeway driving strategies in a mixed environment – autonomous and traditional vehicles
Automatic driving is evolving quickly and highly autonomous cars will be a reality in the next decade. Today, research on driverless cars is mostly vehicle centric. However, in order to obtain all the potential benefits of autonomous cars, in terms of traffic efficiency, traffic management strategies will be more important than ever before. In this context, cooperative driving appears as a way to go. Autonomous vehicles will need to cooperate in order to be globally efficient. One possible strategy of cooperative management of driverless cars would allow creating dense vehicle platoons, with very small spacings emulating a physical linkage between them and creating “road trains”. With such management, autonomous driving will be, not only safe and convenient, but also efficient.
My research in this topic aims to develop a macroscopic and microscopic traffic models able to reproduce the mixed lane behaviour for different penetration levels of autonomous vehicles and platooning. The result of the macroscopic analytical approach will be a robust model, based on few parameters, allowing to identify the existing trade-offs and the best management strategies. In turn the microscopic model will allow analysing the stability and safety of the proposed platooning algorithms. These will be coded as an API for the traffic simulator AIMSUN, in order to ease the assessment of the proposed strategies on realistic environments.
 PATH 1997 Automated Vehicle Platoon Demo on I-15 San Diego
PATH 1997 Automated Vehicle Platoon Demo on I-15 San Diego
This research has been partially funded by the Spanish Ministry of Economy, Industry and Competitiveness, within the National Programme for Research Aimed at the Challenges of Society (grant ref. TRA2016-79019-R and grant ref. PID2019-105331RB-I00)
Modelling vehicle-sharing systems
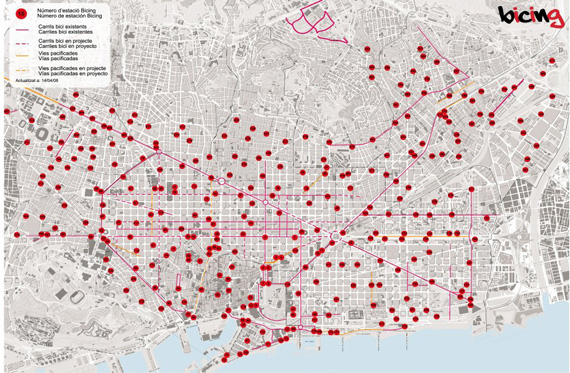
This research direction aims to model shared vehicle systems at strategic, tactical and operational levels. At the strategical level, the objective is to obtain a simple model that establishes the existing trade-offs between the agency costs (i.e. vehicle fleet, stations, repositioning costs) and the user costs (i.e. access, wait and no service penalties). This would allow optimizing the main strategic and tactic variables of the system (i.e. total number of vehicles, density of stations; size of each station, vehicle occupancy at each station after a complete rebalancing period, etc). Also, the model will be able to assess different system configurations, like free-floating versus station-based or even mixed implementations. Alternatively, for given values of these decision variables (e.g. for actual designs) the model will return the key performance indicators and the costs of the system. The model is being applied to bike sharing systems (e.g. the Bicing system in Barcelona) and to car-sharing implementations. In both applications, the additional restrictions due to the use of an electrical fleet of vehicles are considered.
Regarding the tactical and operational problems, research focuses on the vehicle rebalancing strategies. The proposed approach is based on an optimal real-time pairwise matching of tasks to resources. The idea is to obtain a strategy being less dependent on demand forecasts, since the assignment occurs in real time. This avoids the estimation of the future vehicle inventory level at stations. Results obtained by simulation show that the real-time optimal pairwise assignment strategy generally works better, unless the accuracy of the predictions is extremely high, which typically is unlikely. These results have been obtained thanks to the ad-hoc development of an agent-based simulator for vehicle-sharing systems, able to emulate the complex operation of mixed systems, with vehicles both free-floating and in stations, including the possibility of using electric vehicles. The simulator also allows to establish different priority levels for repositioning operations (e.g. recharging and relocation).
Analytical approach to the optimal city layout
Cities have been developed through the gradual accumulation of buildings, roads, and open spaces, with varying degrees of planning and diverse characteristics. Some cities are expansive and sprawling, while others are more compact. Some feature wide, major roads, whereas others have a denser network of smaller streets that offer higher walkability despite lower vehicular capacity. Amidst this diversity, a key question emerges: are some cities more efficient than others? Is there an ideal city design?
This research aims to address these questions bydefining what constitutes an efficient city, particularly in terms of non-motorized accessibility. Next, it examines the optimal urban density and delves into its scientific understanding concerning city design and urban land-use planning, focusing on walking as the primary mode of transportation. The research will ultimately identify an urban density and city layout that are optimal, if any, for non-motorized accessibility.
A methodological and analytical approach will be employed, which will necessitate certain simplifications. Nonetheless, the findings are expected to reveal fundamental trade-offs and produce systemic insights. These insights will inform urban planning policies and standards, aiding in the transition toward more efficient and sustainable urban forms.

